- 首页
- 产品与技术
- 2D近【jìn】距雷达
- 2D中【zhōng】距雷达【dá】
- 2D远距【jù】雷达
- 3D近距雷【léi】达
- 3D中距【jù】雷【léi】达
- 3D远距雷达
- 辅【fǔ】助调测工【gōng】具
推荐产品
- 解决方案
- 公路行【háng】业【yè】
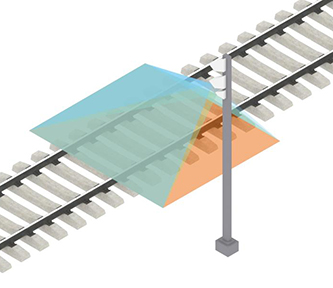
- 铁路【lù】行业【yè】
- 轨道交通行业【yè】
- 智慧物联行业
- 安防行【háng】业
- 矿【kuàng】冶行业【yè】
- 建材【cái】行业
- 电力行【háng】业
- 港【gǎng】口行业
- 科技【jì】治超
- 交通调查【chá】
- 车型识别【bié】
- 车辆【liàng】分【fèn】离
- 隧道检【jiǎn】测
推荐方案
- 服务与支持
- 新闻中心
- 关于天河
- 加入天河
-


- 区域/语言